Түштүк Кореянын KAIST университетинин изилдөөчүлөрү роботтор ийилчээк буюмдар менен иштей ала турган жаңы технологияны жаратышты.
Роботтордун зым, резинка, кийим-кечек сыяктуу ийилчээк нерселер менен иштей алуусу – өндүрүш менен кызмат көрсөтүү тармактарын автоматташтыруудагы маанилүү милдет.
Бирок мындай деформациялануучу объекттердин туруктуу формасы жоктугунан жана алардын кыймылын алдын ала айтуу кыйын болгондуктан, роботтор аларды так таанып-билүүдө жана башкарууда чоң кыйынчылыктарга кабылып келишкен.
Эми Түштүк Кореядагы KAIST (Korea Advanced Institute of Science and Technology) университети жарыялагандай, алардын изилдөөчүлөрү деформациялануучу объекттердин абалын так аныктап, ал тургай толук эмес визуалдык маалымат менен да аларды чеберчилик менен башкарууга мүмкүндүк берген робот технологиясын иштеп чыгышты.
https://news.kaist.ac.kr/newsen/html/news/?mode=V&mng_no=50690
Бул жетишкендик кабель жана зымдарды чогултуу, жумшак тетиктерди колдонгон өндүрүштө, ошондой эле кийимдерди ирээтке келтирүү жана таңгактоо сыяктуу ар кандай өнөр жай жана тейлөө тармактарын акылдуу автоматташтырууга салым кошору күтүлүүдө.
Ийилчээк буюмдарды башкаруу
KAIST университетинин маалыматында белгиленгендей, алардын Компьютердик илимдер факультетинин профессору Дэхён Пак (Daehyung Park) жетектеген изилдөө тобу INR-DOM (Implicit Neural-Representation for Deformable Object Manipulation – Ийилчээк буюмдарды башкаруу үчүн тикелей эмес нейрондук көрсөтмө) аттуу жасалма интеллект технологиясын түзө алышты.
Бул технология роботторго резинка өңдүү формасы дайыма өзгөрүп турган жана көз менен айырмалоо кыйын болгон буюмдарды чеберчилик менен башкарууга мүмкүндүк берет.
Ийилчээк буюмдарды башкаруу (DOM) – робот техникасындагы эзелтен келе жаткан кыйынчылыктардын бири. Себеби мындай буюмдардын кыймылын алдын ала айтуу кыйын. Мындан тышкары, буюмдун өзүнүн айрым бөлүктөрүн жаап коё турган феномени (өзүн-өзү жаап коюу) роботторго анын жалпы абалын түшүнүүдө кыйынчылык жаратат.
Бул маселени чечүү боюнча буга чейинки технологиялардын кемчиликтерин жоюу үчүн KAIST университетинин изилдөөчүлөрү “Тикелей эмес нейрондук көрсөтмө” (Implicit Neural Representation) ыкмасын колдонушкан.
Бул технология робот байкаган үч өлчөмдүү маалыматтын бир бөлүгүн (point cloud- чекиттер булуту) алып, көрүнбөгөн бөлүктөрдү кошуп, объекттин жалпы формасын үзгүлтүксүз бет катары калыбына келтирет. Мунун аркасында робот адамдар сыяктуу эле объекттин жалпы формасын элестете жана түшүнө алат.
Изилдөөчүлөр роботтор үчүн кош баскычтуу үйрөнүү ыкмасын да иштеп чыгышты. Биринчи баскычта робот толук эмес маалыматтан буюмдун формасын так калыбына келтирүүнү үйрөнөт. Экинчи баскычта бекемдөөгө жана салыштырма үйрөнүүгө негизделген ыкма аркылуу робот учурдагы абал менен максатты айырмалап, тапшырманы аткаруу үчүн эң мыкты аракетти табат.
Тапшырмаларды аткартуу
INR-DOM технологиясы роботко орнотулуп, сыноо жүргүзүлгөндө, симуляциялык чөйрөдө үч татаал тапшырманы аткарууда мурунку эң мыкты технологияларга караганда кыйла жогорку ийгилик көрсөткөн.
Алар: резинканы оюкка салуу, O-резинканы бөлүккө орнотуу жана чырмалышкан резинкаларды чечүү тапшырмалары.
Айрыкча эң кыйын тапшырма – чырмалышкан резинкаларды чечүүдө ийгилик көрсөткүчү 75%га жеткен, бул мурунку мыкты технология ACIDдин 26% көрсөткүчүнөн 49%га жогору.
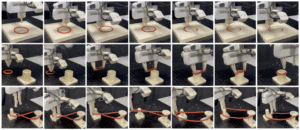 Роботтун колу мөөр басуу, резина шакекти оюкка киргизүү, цилиндрге О-шакекти орнотуу жана эки мамычанын ортосуна чырмалып калган резина боону чечүү тапшырмасын аткарууда.
Роботтун колу мөөр басуу, резина шакекти оюкка киргизүү, цилиндрге О-шакекти орнотуу жана эки мамычанын ортосуна чырмалып калган резина боону чечүү тапшырмасын аткарууда.
Изилдөөчүлөр INR-DOM технологиясын чыныгы чөйрөдө да колдонууга боло турганын текшеришти. Алар роботтук бекемдөөгө негизделген үйрөнүү ыкмасын INR-DOM менен айкалыштырып, аны чыныгы чөйрөдө колдонушту.
Натыйжада робот чыныгы чөйрөдө резинканы салуу, орнотуу жана чырмалышкан резинкаларды чечүү тапшырмаларын 90%дан жогору ийгилик менен аткарды.
Айрыкча визуалдык жактан кыйын болгон эки багыттуу чырмалышкан резинкаларды чечүүдө, мурунку сүрөткө негизделген үйрөнүү ыкмаларга караганда 25% жогорку ийгиликке жетти. Бул визуалдык татаалдыкка карабастан роботтордун так башкаруу көрсөткүчүн далилдеди.
KAIST университетинин маалыматында көргөзүлгөндөй, алардын изилдөөчүлөрүнүн жетишкендиги “робот технологиясын өнүктүрүүгө чоң салым кошот жана өндүрүш, логистика, медицина сыяктуу тармактарда адамдар менен бирге же адамдардын ордуна татаал тапшырмаларды аткарган роботтордун мүмкүнчүлүгүн кеңейтет.”
Шилтемелер:
- Маалымат макала KAIST университетинин интернет баракчасындагы https://news.kaist.ac.kr/newsen/html/news/?mode=V&mng_no=50690 маалыматтын негизинде жазылды.
- Башкы сүрөт unsplash.com сайтынан алынды.
Макала ичиндеги сүрөт KAIST университетинин интернет баракчасынан https://news.kaist.ac.kr/newsen/html/news/?mode=V&mng_no=50690 алынды.